モバイル機器では数式が正しく表示されない場合があります
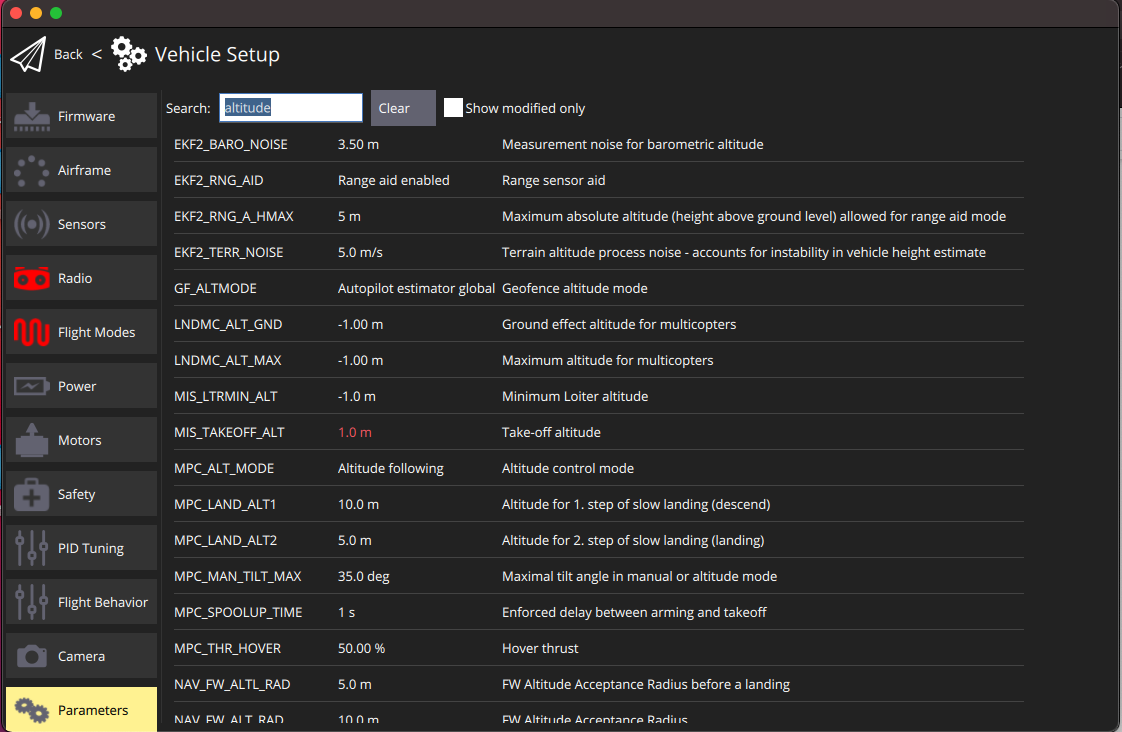
屋内ドローンにとって離陸するときの高度はとても大事だ。Pixhawkはデフォルトで、2.5mになっていて、この部屋でそれだけ飛ばれたら、天井にぶち当たってしまう。Mavsdkの中にこのデフォ流値を変更する関数があるか何度も調べたが見つからない。となるとQGroundControlとなる。このパラメータの中を結構何度も調べたのだが数がありすぎて見つからなかったが、パラメータ検索で、"altitude"としたら見つかった。MIS_TAKEOFF_ALTである。そしてようやく1mに変更できた。
システムで、dshot信号を作るのをpicoでやらせていた。UARTの使用の関係で、pico1台で、2つのモータに信号を送っていたので、2つのpicoを使っていた。それまでは、pico二信号を送って、あなたはどちらのpicoですかと問い合わせして、その答えを聞いて /dev/t...

0 件のコメント:
コメントを投稿