ドローンにPID制御をかけると、安定化は可能であるが同時に機体の揺れも発生させる。この状況を数値シミュレーションする。ただし、今回は、ESCに与える信号と、モーターの回転数の変化の間に遅れが発生しないことを前提にする。このラグのある場合の状況は次に試みる予定だ。
というよりも、もともとこの分析を始めるきっかけが、自作ドローンの信号とモーター回転数の間にあるラグがPID制御の不安定の原因だと思ったことだ。それを分析したいのだが、まず単純でピュアな状態を分析しなければ話にならないので、最初はその前提で進める。
モデルを示そう。

4ローターのドローンを想定しているが、問題の趣旨から、ロールないしはピッチの片方だけ考慮すればよい。上図のように、モーターの腕方向に機体座標が設定されているとする。
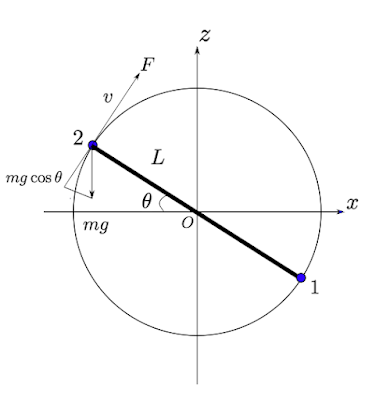
接線方向の運動方程式を立てる。モーターによる推力を$F$とする。重力加速度を$g$、機体のモーターにかかる重さを$m$とする。これは全機体重の1/4と考えてよいかもしれない(深く考えると色々ありそうだが、無視する)。さらに、図のように、機体がピッチが正の方向に$\theta$(ラジアン単位)だけ傾いているとしよう。上向きの接線方向の速度を$v$とすると、運動方程式は次のようになる。
$$\begin{equation} m\frac{dv}{dt}=F-mg\cos \theta \end{equation}\label{eq1}$$
また、角速度を$\omega$とすると、次の式が成立する。
$$\begin{equation}v=L\frac{d\theta}{dt}=L\omega\end{equation}\label{eq2}$$
プロペラの1分あたり回転数を$V$(単位rpm)とする。一般に、推力$F$ は、$V$の二乗に比例すると考えられているので、次の式を考える。
$$\begin{equation}F=\delta V^{2}\end{equation}\label{eq3}$$
ここで、$\delta$は、ある与えられたプロペラの元でのモーターパワーを表すパラメータと考えれば良い。
PID制御のP制御(比例制御)を次の式で導入する。微分(D)制御も入れることは可能だが、以下計算がさらに複雑になるので、次の課題とする。ただし、D制御を入れないと安定化しない場合があるので、それは念頭に置いておかなければならない。(D制御を入れたモデルは、次の記事で行なっているPID制御によるドローンの揺れに関する数値シミュレーション(4):P制御+D制御モデル)
$$\begin{equation}V=V_{0}-p\theta\end{equation}\label{eq4}$$
ここで、$V_{0}$は、ホバリングを実現可能なスロットルレベルに対応したモーターの回転数である。$p$は、P制御の水準である。すなわち、このシミュレーションモデルにある唯一の制御変数である。$\theta$はピッチ角なので、ピッチ角に比例してモーターの回転数を制御することになる。ピッチ角がゼロの時は、ホバリングレベルのモーター回転数で、ピッチが正になると回転数を落とす方向に、逆に負になると回転数を増やす方向に変化させる。
私が自作のドローンで問題視しているのは、この制御信号が回転数に変化する上で200m秒くらいタイムラグがあることだ。それを本来調べるためのこの数値シミュレーションをしようと思ったのだが、そのタイムラグを入れるのは次の課題としてて、まず、タイムラグなしにESC信号をモータは回転数に反映させるとここでは考えている。(制御の遅延を組み込んだモデルは、このシリーズの「(6)の記事」以降で解析している)
この制御式$\eqref{eq4}$を、回転数と力の関係$\eqref{eq3}$に入れる。
$$\begin{equation}F=\delta V^{2}=\delta (V_{0}-p\theta)^{2}=\delta V_{0}^{2}-2p\delta V_{0}\theta+p^{2}\delta \theta^{2}\end{equation}\label{eq5}$$
簡単化かのためにこの式を次のように表そう。
$$\begin{equation}F=\alpha-\beta\theta+\gamma\theta^{2}\end{equation}\label{eq6}$$
$$\begin{equation}mL\frac{d^{2}\theta}{dt^{2}}=\alpha-mg\cos \theta-\beta \theta+\gamma \theta^{2} \end{equation}\label{eq7}$$
両辺を$mL$で割ると、
$$\begin{equation}\frac{d^{2}\theta}{dt^{2}}=\frac{1}{L}\left(\frac{\alpha}{m}-g\cos \theta\right)-\frac{\beta \theta}{mL}+\frac{\gamma}{mL} \theta^{2} \end{equation}\label{eq8}$$
を得る。これは、二階非線型常微分方程式である。これを満たす$\theta$の振る舞いについて、解析的を求める方法が有るかどうかはわからなかった。しかし、ここでおこなう数値シミュレーションはこのままの形で実行可能、実際、あとでその結果を示すことができる。
ただ、その前に、ここでは議論をわかりやすくするために、$\theta$の値が小さい範囲で成立する、
$$\cos\theta\simeq 1$$
という近似を用いて議論の見通しをよくする。この時、$\eqref{eq8}$は、次のように書き換えることができる。
$$\begin{equation}\frac{d^{2}\theta}{dt^{2}}=\frac{1}{L}\left(\frac{\alpha}{m}-g\right)-\frac{\beta \theta}{mL}+\frac{\gamma}{mL} \theta^{2} \end{equation}\label{eq9}$$
これもまた、二階非線型常微分方程式であるが、これには解析解が存在している。(例えば. http://www6338.la.coocan.jp/mathematics/diff-equation.pdf 参照)しかし、それはワイエルシュトラスの$\wp$関数を用いて表現される楕円関数を使うもので、そこまで複雑なものは上手く扱えない。
そこで、さらに、この$\theta$の二乗の項(右辺最後の項)が存在しなかった場合を考えてみよう。すなわち、
$$\begin{equation}\frac{d^{2}\theta}{dt^{2}}=\frac{1}{L}\left(\frac{\alpha}{m}-g\right)-\frac{\beta \theta}{mL}\end{equation}\label{eq10}$$

0 件のコメント:
コメントを投稿