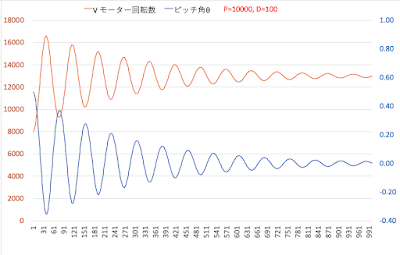
ドローン姿勢のPID制御のうち、P制御とD制御を行なったシミュレーション結果を示す。これまでの議論については、以下のページを参照してください。
PID制御によるドローンの揺れに関する数値シミュレーション(1):理論編
PID制御によるドローンの揺れに関する数値シミュレーション(2):シミュレーションモデル
以下で解説する、EXCELのシミュレーションファイルは、以下からダウンロードできる。(基本的にEXCELで開いてください。Googleのスプレッドシートなど代替ソフトで開くと、計算とグラフ表示に問題が生じる可能性があります。クリックして、Googleのスプレッドシートが開いてしまった場合は、メニューの「ファイル」から一旦ダウンロードしたのちにExcelで再実行してください)
EXCELファイル(モジュールなし)のダウンロード(2022/01/28修正)
EXCELファイル(モジュール組み込み済み)のダウンロード(2022/01/28修正)
シミュレーションにはRKMETHODという自作の関数をEXCELのVBAで作成し使用している。モージュールなしを選んだ場合は、それがないというエラーが出るので、「ツール」→「マクロ」からVBAのエディタを開いて、「挿入」→「標準モジュール」をクリックして、エディタを開き、次の関数をコピペしてください。そして、PDパラメータなどを更新すると正しく表示されます。
(次から)
Function RKMETHOD(a As Double, b As Double, c As Double, d As Double, e As Double, j As Double, s As Double, omega As Double, theta As Double, k_omega As Double, k_theta As Double) As Double
RKMETHOD = a + b * (theta + k_theta) + c * (theta + k_theta) ^ 2 + d * (omega + k_omega) + e * (theta + k_theta) * (omega + k_omega) + j * (omega + k_omega) ^ 2 + s * Cos(theta + k_theta)
End Function
(以上)
ファイルの使い方を説明する。

ファイルを開くと左側に、パラメーターの設定欄、右側にシミュレーションの実行画面が現れる。パラメータを変更すると自動的にシミュレーション結果も変更される。ただし、計算量が多いので、時間が1、2分かかる場合があるかもしれない。その時はそのまま待つしかない。
開いたEXCELシートの左側のパラメータは、私の自作ドローンの使用に沿ったものが書いてある。薄緑蘭のものは、任意に変更が可能である。薄赤の欄は、自動的に変更されるパラメータである。
パラメータの説明を加える。
| スロットル(回転数:rpm) |
| 回転数を力に変換 |
| 機体質量 Kg |
| 中心とモーター間の距離 m |
| 制御パラメータP |
| 制御パラメータD |
| Δt (時間間隔:秒) |





0 件のコメント:
コメントを投稿