今年の2月くらいまでは、 自作のドローンを東京板橋区の狭い自室で飛ばしても、見えてくるものは何も無くなって、どうしようかと苛立っていた。
3月になって、ドローンを飛ばす自分の土地を手に入れようと重箱の隅をつつくようにネットを漁っていて、千葉東金市の二之袋というところに100坪の土地を見つけた。たぶん、超格安だと思う。ネットを見過ぎて頭に相場感覚が刷り込まれてしまっている(笑)
成田空港の規制からも距離的にギリギリ外れていて、DID地区でもないので、自分の土地でやる限り特に規制がない状況だ。ただ、古い造成地なので、近所の皆さんに迷惑をかけない努力は怠ることはできない。
ただ、二之袋は九十九里浜から4キロ程度しか離れていないせいだと思うが、海風、陸風なのか、いつも弱い風が吹いている。安定感の脆弱なドローンにとって、風は大敵だ。そこで、塩ビのパイプを組み合わせてフレームを組み、工事用のシートを組み合わせて、4畳くらいの広さの風よけテントを作った。

一面は、物の出し入れなどのために、シートは貼らない。風向きによって開ける面は変える。高さは、2.5メートルほどで大したことはない。シートは、滑車で上げ下げする。普段は、塩ビのパイプフレームだけになっている。
塩ビのパイプフレームは、ボンドを使っていない。安定は、何本も張られた鉄線によって確保されている。シートが張っていない状況では、台風でも倒れない地震はある。一方、壊す時は30分もかからずにできると思う。
本当は、もっと高さと広さが欲しいが、一人で組み立てるのはこれが精一杯だ。手前のガーデンテーブルは、2X4木材で、自作したもので必需品だ。
初飛行の状況は次のyoutubeを見てほしい。

一本の紐で、どこでも飛んで行かないようにした。今までになかった、5メートルという長さにしたが、それでもそれ以上に飛ぼうとして墜落してしまった。ドローンは、コントローラーで飛ばすのではく、事前に組み込んだ飛行プログラムに剃って飛ぶようにしている。プログラムは、自作のインタープリターだ。(プログラム使用についてはこちらを参照)そのプログラムのホバリング時の設定スロットルが大きすぎた。
5メートルというのは風よけテントよりも高いので、テントを超えた途端風に煽られたという問題もあった気がする。
飛行のログを以下で示そう。
(1)高度と機体の傾き

青は、超音波高度センサーのデータ、赤が機体のロール方向の傾き、緑が同じくピッチ方向の傾きである。大きな揺れが収束しない状況が読み取れる。
高度の揺れは、超音波センサーが機体が揺れると同じように揺れるので、とらえる高度が変わってしまうために発生する。HCSRを使う限り避けられない。次の機体バージョンでは、別の光センサー使う予定だ。
(2)PID制御の信号強度

先の期待の傾きに対して、カウンターリアクションを作るための、P制御の強度、およびD制御の強度を、高度のグラフとともに示している。機体の傾きにD制御は先行していて、それを収めようとしている。細かいインパルスは、制御センサーが送り込んでくる値に含まれる、細かい揺れに反応しているためである。
(3)モータスピードの制御値
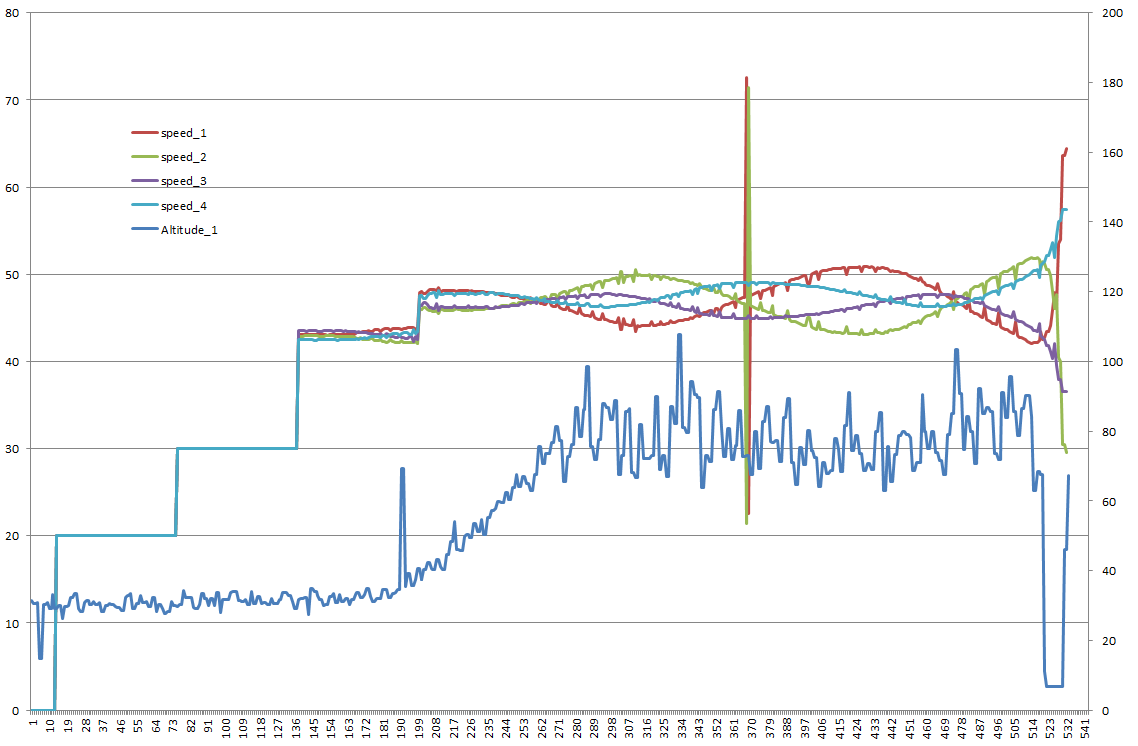
信号自体は安定している。プロペラの回転数を測るタコメーターが、故障していたため、これがどのように実際化していたのかは調べられない。
結論的に、揺れが抑えられていないのは、D制御の値が少し小さいためであるように考えている。

0 件のコメント:
コメントを投稿